
Why I created the Servo motor sizing spreadsheet
Introduction
Nowadays, most applications in mechanical engineering include a servomotor. Servomotors are relatively cheap and provide great precision and flexibility, especially if compared with more traditional methods like cams.
The sizing of servomotors is fairly simple for nearly static applications, where the inertia of the system is negligible compared to the static load. When starting to increase the acceleration of a system, the sizing process becomes less straight forward and some iterations are normally needed to reach an optimum solution. Typically this process is followed:
- Define and calculate the motion profile
- Calculate the torque due to the load
- Define a range of motors and gearboxes that fit with the speed/torque requirements
- Evaluate the additional torque caused by the inertia of the motor and gearbox
- Verify if any of the solutions previously defined can fulfil the additional force
- Iterate
I don't like to perform iterations, since I think that the human mind is made for something greater than that. Also, I found myself creating a new spreadsheet/sketch/calculation every time a project needed the sizing of a servomotors, bringing to a big frustration for the loss of time.
Why a servo motor sizing spreadsheet
This is what lead to the creation of the Servo motor sizing spreadsheet. I wanted to create a spreadsheet that could:
- Include the whole process of calculating the load (either linear or rotary) of an application, including the motion profile definition.
- Give the possibility of selecting the motors and gearboxes from a defined list, avoiding the hassle of looking through the suppliers websites.
- Provide the user with a list of results by only clicking a button, avoiding all the iterations needed for the "classical" approach.
- Allow to filter the results depending on the desired parameters, may it be the overall weight of the motor/gearbox, the torque, the current needed, etc.
The servo motor sizing spreadsheet
The Servo motor sizing apreadsheet includes all the features needed to size a system from beginning to end.
The user starts by defining the motion profile: if the acceleration and speed of the system are already known, they can be inputted directly. Otherwise, the user can define a motion profile including up to 6 reference points. The profile can either be selected for an application which has to move between different speeds or different positions. The calculations are done on a linear or rotary basis, depending on the designer specification. Finally, the acceleration is calculated selecting from various profiles available (E.g. trapezoidal, sine wave, etc).
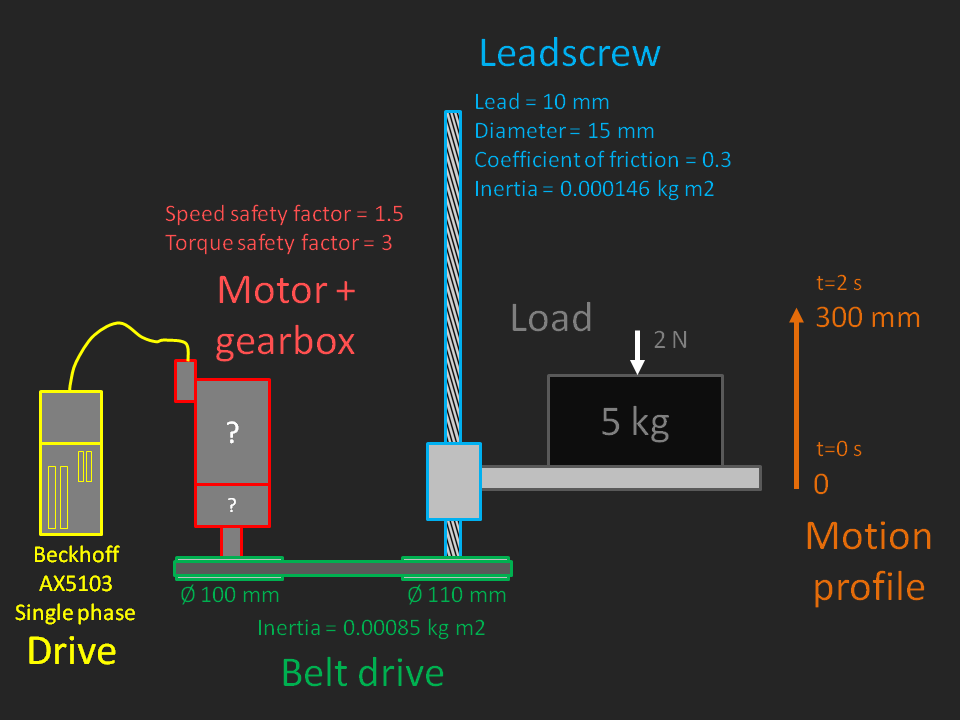
After defining the motion profile, the user can specify the load. If the application is rotary, inertia and torque of the load will be specified. If the movement is linear, it is assumed that a leadscrew system will be used. In that case the user will be asked to specify all the parameters needed for defining the load, including:
- Orientation of the load
- Mass of the load
- Force applied to the load
- Leadscrew diameter and lead
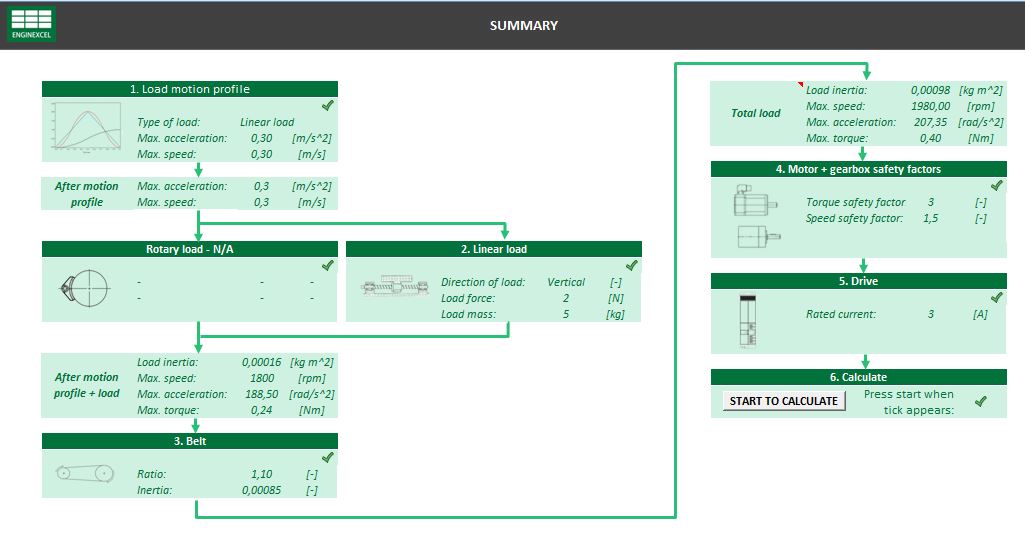
After the parameters are inputted, the spreadsheet automatically calculates the torque needed for moving the load with the defined motion profile. These values are show in the load page and also summarised in the main page.
The following step is the setting of the belt drive. In the apposite page it's possible to choose if the belt is present and define the pulleys diameters and the overall inertia. The speed, acceleration and torque are automatically updated to the motor side of the pulley.
The user can then define the safety factors to be used in the calculation. It is possible to input the safety ratios related to torque and to speed. All the servos and gearboxes with a safety ratio lower than the one defined will not be considered as acceptable results.
Finally, the designer can select the drive that will power the motor. This can be picked from a drop down list. As an alternative, the maximum available current can be manually inputted or ignored.
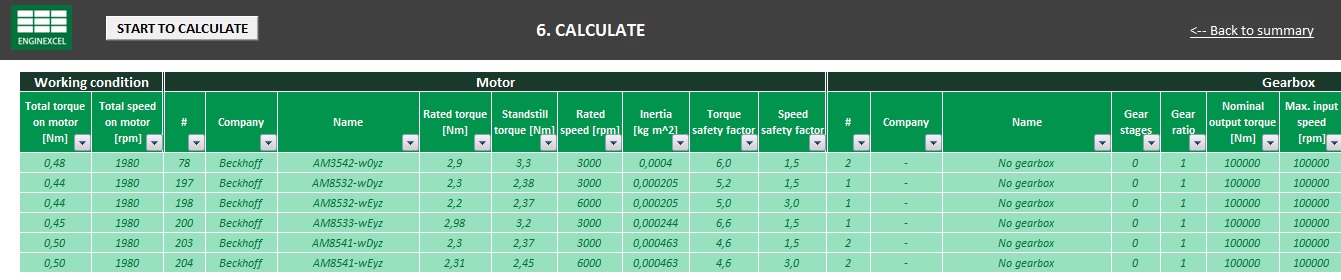
At this point the spreadsheet is ready to calculate which combinations of motors/gearboxes will be suitable for the application. When the user presses start, the all the combinations of servos and gearboxes are evaluated, including the condition where the motor is connected directly to the load. For each combination, the torque needed to accelerate the motor and the gearbox is added to the one needed to accelerate the load. The resulting torque and speed are compared to the one achievable by each motor. If the safety ratio is higher than the one specified, the resulting combination is fully calculated and listed in the results table. Here the user can filter all the resulting combinations depending on the parameter that he is interested in.
As an example, if the application needs a precise control loop, the user will firstly look at the inertia ratio column. Otherwise, if the designer is looking for a low energy consumption, he may look at the torque column first. Several column are available, including:
- Motor torque
- Motor speed
- Torque safety factor
- Speed safety factor
- Overall weight
- Inertia ratio
Servo motor sizing spreadsheet release notes
Use
Servo motor sizing spreadsheet can be tried for free for 15 days. After the trial period you will have to purchase a license to continue using the spreadsheet with full functionality.
Compatibility
Servo motor sizing spreadsheet is tested on Microsoft Excel 2007, 2010, 2013 and 365 for Windows. Microsoft Excel for Mac is currently not compatible.
Activation
To activate the functionalities of the spreadsheet you may need to click on Enable editing and Enable content after opening it for the first time.
